北京泵网站建设/网站移动端优化工具
摄像机模型与标定--摄像机模型介绍(转)
一、摄像机的线性模型
引言
在计算机视觉中,摄像机成像模型解决的是将三维场景中的坐标与摄像机得到额图像的二位坐标联系起来。常用的摄像机成像模型有三种:小孔成像模型,正交投影模型,拟透视投影模型。其中,用的最多的成像模型还是小孔成像模型。本文,将着重介绍小孔成像模型。
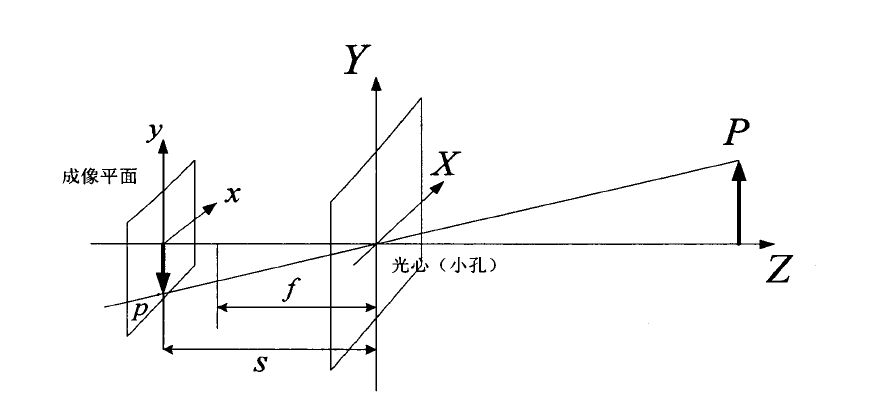
图1:小孔成像原理
在小孔成像模型中,将光心当做小孔,并假设光线满足直线传播的条件。在三维场景中的P点,经过光心在像平面上投影成倒像p点。显然,小孔成像模型主要由光心,光轴,成像平面三个部分组成。但是,在实际的环境中,由于小孔的透光量非常小,在成像平面形成清晰地像需要较长的时间曝光,所以实际的摄像机(如CCD摄像机)的光学系统大多是由透镜组成。这种摄像机的成像原理与小孔成像模型相似。
摄像机线性成像模型中三种坐标的转换关系
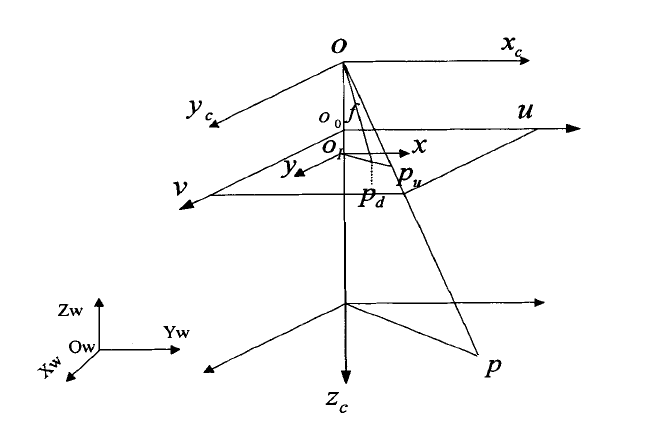
图2:摄像机线性成像模型中坐标的转换关系
(1)从世界坐标系到摄像机坐标系的坐标转化
由于摄像机与被摄物体可以放置在环境中任意位置,这样就需要在环境中建立一个坐标系,来表示摄像机和被摄物体的位置,这个坐标系就成为世界坐标系。(如图2中的(OW−XWYWZW))。
以摄像机光心为原点O,光轴为ZC轴,建立的直角坐标系即为摄像机坐标系(如图2中的(OC−XCYCZC))。
摄像机坐标与世界坐标的转换可以通过旋转矩阵R和一个平移向量t完成,具体如下:
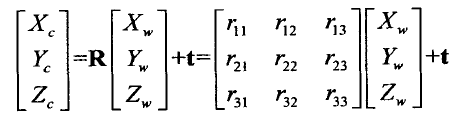
其齐次坐标表示为:
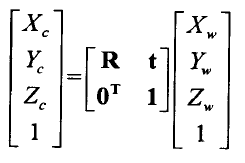
其中,t为三维平移向量,t=[t1,t2,t3],0=[0,0,0];旋转矩阵R为3X3的单位正交矩阵,其矩阵元素满足:
(2)摄像机坐标向图像物理坐标的转换
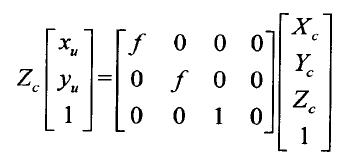
在摄像机的线性成像模型中,三维场景任意一点P在摄像机成像平面上的投影为Pu,它是摄像机光点O与场景中物点P的连线与摄像机成像平面的交点,这种关系也称为透视投影。图像物理坐标是一个二维坐标,它的原点O1是摄像机光轴ZC与成像平面的交点,即光点,x轴与XC轴平行,y轴与YC轴平行。在图2中,OO1为摄像机的焦距f,根据相似三角形的原理,可以轻松的得到摄像机坐标投影到图像物理坐标的转换公式:
用齐次坐标与矩阵形式表示为:
(3)图像物理坐标向图像像素坐标的转换
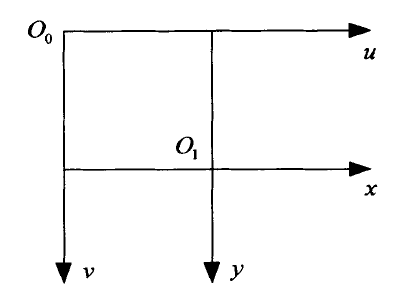
图3:图像像素坐标与图像物理坐标
摄像机拍摄的图像在计算机中存储是以MXN矩阵的形式进行存储,其中一个单元称之为像素。显然,在图像上定义的图像像素坐标系是一个二直角坐标系,如图3所示。一般情况下,图像像素坐标系的原点O0取图像的左上角,u轴与图像物理坐标系的x轴平行,v轴与图像物理坐标系y轴平行。在图像像素坐标系中,一点的坐标(u,v)表示他的行数和列数,其单位为像素。要知道其图像物理坐标必须需要每个像素在u和v方向物理长度k和l。摄像机的光轴与成像平面的交点O1,即为图像物理坐标的原点,同时也成为图像的主点,主点理论上位于图像的中心,但是由于摄像机制造技术的缺陷,主点往往不能会偏移图像的中心。设主点O1在图像像素坐标系中的坐标的为(u0,v0)。就可以得到图像像素坐标与图像物理坐标之间的转换关系如下:
其齐次坐标与矩阵形式表示为:
综合以上所有的分布得到的公式,就可以得到图像坐标(u,v)与世界坐标的(XW,YW,ZW)之间的转换关系为:
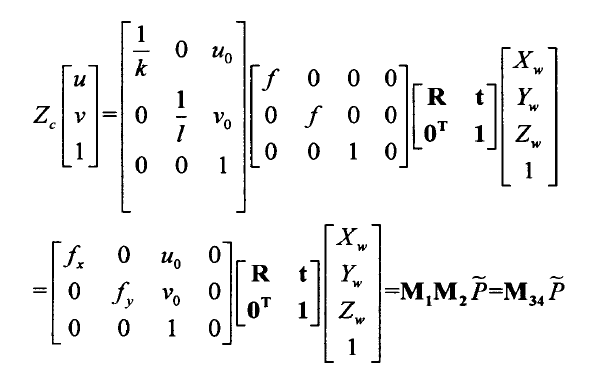
其中M34称为投影矩阵;M1称为内参数矩阵,它由像素焦距fx,fy和主点坐标(u0,v0)这些与摄像机内部参数所决定,内参数矩阵在后续的标定过程中将是一个不变的量;M2称为外参数矩阵,它由旋转矩阵R和平移向量t所决定,它们描述的是摄像机相对于世界坐标系的位置和方向。
二、摄像机的非线性模型
世界上没有完美的工艺,也就不能生产完美的透镜组装完美的摄像机,这就要求我们需要将这些不完美进行必要的数学纠正,已达到理论上的完美。摄像机的不完美主要体现在透镜的畸变,分为径向畸变(来自于透镜形状的不完美)和切向畸变(来自于透镜与成像平面不完全平行)。
首先从径向畸变开始,实际摄像机的透镜总是在成像仪的边缘产生显著的畸变。这个问题来自于“筒形”和“鱼眼”的影响。如图4给出了径向畸变的直观提示。
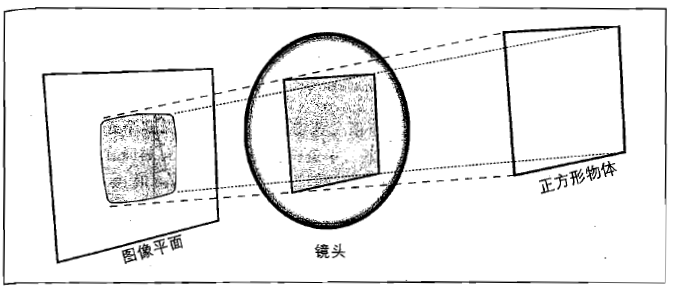
图4:径向畸变
对于径向畸变,成像仪中心(光学中心)的畸变为0,随着向边缘移动,畸变越来越重。实际情况中,这种畸变比较小,而且可以用r=0位置周围的泰勒级数展开前几项来定量描述。通常,摄像机某点的径向位置按照下式进行调节:

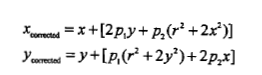
第二个常用的畸变就是切向畸变。这种畸变是由于透镜制造上的缺陷是的透镜本身与图像平面不平行而产生的。切向畸变可以使用两个额外的参数p1和p2来描述
至此,摄像机成像模型介绍完毕。
备注:相关数学知识的解释
齐次坐标
齐次坐标把维数为n投影空间上的点用(n+1)维来表示(如(x,y,z)表示为(x,y,z,w)),其限制条件是任何两点的交比不变。齐次坐标的优点是把向量的相加计算转换为矩阵的点积运算。
旋转矩阵参考文章
http://wenku.baidu.com/link?url=ZuL49qBjmDGm0FLzxRN3cYY8YJOpMTI1HxmJxg40whAmWoLuF2Wbgpdxq7DHKhWGYInRFpGEjdlKUww0GLzdbq_OlduMYX8dYAUoxt3Nu0i