网站建设要学哪些/品牌营销策划怎么写
文章目录
- 第一步:基于已完成的ResNet模型进行修改
- 第二步:绘制训练、验证、测试集训练过程
- 排查错误1
- 排查错误2
上一步已经实现了读取图片的功能(pokemon写成了pokeman,已经修改),只需要完善网络模型进行训练即可
第一步:基于已完成的ResNet模型进行修改
之前完成的ResNet18的网络结构
import torch
from torch import nn
from torch.nn import functional as Fclass ResBlk(nn.Module):def __init__(self,ch_in,ch_out,stride=1):super(ResBlk,self).__init__()self.conv1 = nn.Conv2d(ch_in,ch_out,kernel_size=3,stride=stride,padding=1)self.bn1 = nn.BatchNorm2d(ch_out)self.conv2 = nn.Conv2d(ch_out,ch_out,kernel_size=3,stride=1,padding=1)self.bn2 = nn.BatchNorm2d(ch_out)self.extra = nn.Sequential()if ch_out != ch_in:self.extra = nn.Sequential(nn.Conv2d(ch_in,ch_out,kernel_size=1,stride=stride),nn.BatchNorm2d(ch_out))def forward(self, x):out = F.relu(self.bn1(self.conv1(x)))out = self.bn2(self.conv2(out))#[b, ch_in, h, w] = > [b, ch_out, h, w]out = self.extra(x) + outout = F.relu((out))return outclass ResNet18(nn.Module):def __init__(self,num_class):super(ResNet18, self).__init__()self.conv1 = nn.Sequential(nn.Conv2d(3,64,kernel_size=3,stride=3,padding=0),nn.BatchNorm2d(64))# followed 4 blocks# [b, 64, h, w] => [b, 128, h ,w]self.blk1 = ResBlk(64,128)# [b, 128, h, w] => [b, 256, h ,w]self.blk2 = ResBlk(128,256)# [b, 256, h, w] => [b, 512, h ,w]self.blk3 = ResBlk(256,512)# [b, 512, h, w] => [b, 1024, h ,w]self.blk4 = ResBlk(512,512)self.outlayer = nn.Linear(512*1*1,num_class)def forward(self,x):x = F.relu(self.conv1(x))x = self.blk1(x)x = self.blk2(x)x = self.blk3(x)x = self.blk4(x)print('after conv:', x.shape)# [b, 512, h, w] => [b, 512, 1, 1]x = F.adaptive_avg_pool2d(x, [1, 1])print('after pool:', x.shape)x = x.view(x.size(0), -1)x = self.outlayer(x)return xdef main():blk = ResBlk(64,128,stride=2)tmp = torch.randn(2,64,224,224)out = blk(tmp)print('block:',out.shape)model = ResNet18(5)tmp = torch.randn(2,3,224,224)out = model(tmp)print('resnet:',out.shape)p = sum(map(lambda p:p.numel(), model.parameters()))print('parameters size:',p)if __name__ == '__main__':main()
第二步:绘制训练、验证、测试集训练过程
import torch
from torch import optim,nn
import visdom
import torchvision
from torch.utils.data import DataLoader
from pokemon import Pokemon
from resnet import ResNet18batchsz = 32
lr = 1e-3
epochs = 10device = torch.device('cuda')
torch.manual_seed(1234)train_db = Pokemon('pokemon', 224, mode='train')
val_db = Pokemon('pokemon', 224, mode='val')
test_db = Pokemon('pokemon', 224, mode='test')
train_loader = DataLoader(train_db, batch_size=batchsz, shuffle=True,num_workers=4)
val_loader = DataLoader(val_db, batch_size=batchsz, num_workers=2)
test_loader = DataLoader(test_db, batch_size=batchsz, num_workers=2)def evalute(model, loader):model.eval()correct = 0total = len(loader.dataset)for x,y in loader:x,y = x.to(device),y.to(device)with torch.no_grad():logits = model(x)pred = logits.argmax(dim=1)correct += torch.eq(pred,y).sum().float().item()return correct/totaldef main():if hasattr(torch.cuda, 'empty_cache'):torch.cuda.empty_cache()model = ResNet18(5).to(device)optimizer = optim.Adam(model.parameters(),lr=lr)criteon = nn.CrossEntropyLoss()best_acc,best_epoch = 0,0for epoch in range(epochs):for step,(x,y) in enumerate(train_loader):# x:[b,3,224,224]x,y = x.to(device),y.to(device)model.train()logits = model(x)loss = criteon(logits,y)optimizer.zero_grad()loss.backward()optimizer.step()if epoch % 2 ==0:val_acc = evalute(model,val_loader)if val_acc>best_acc:best_epoch = epochbest_acc = val_acctorch.save(model.state_dict(),'best.mdl')print('best acc:', best_acc, 'best epoch:', best_epoch)model .load_state_dict(torch.load('best.mdl'))print('loaded from ckpt')test_acc = evalute(model,test_loader)print('test acc:',test_acc)if __name__ == '__main__':main()
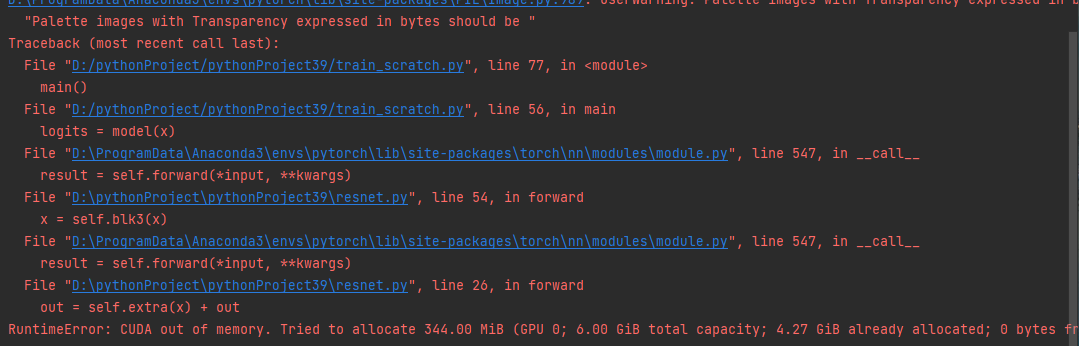
排查错误1
这里代码运行出现问题:报错如下
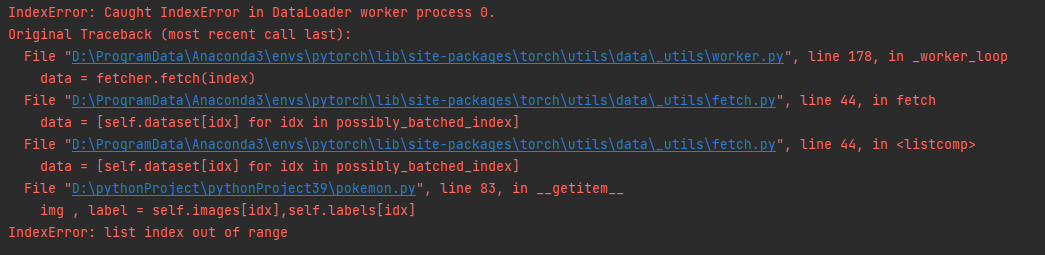
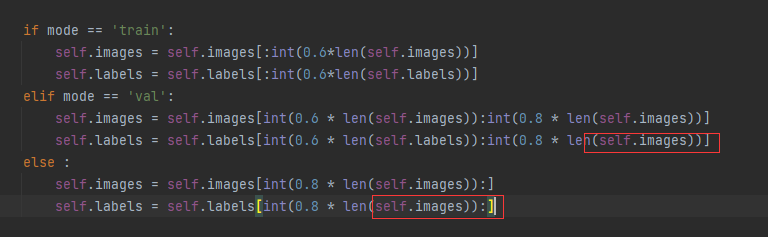
经过排查,发现pokemon中对原始数据划分有误,太粗心了!
排查错误2
接着训练过程中爆显存了,考虑到降低resnet训练时的参数数量
经过简单修改后的resnet模型代码:
import torch
from torch import nn
from torch.nn import functional as Fclass ResBlk(nn.Module):def __init__(self,ch_in,ch_out,stride=1):super(ResBlk,self).__init__()self.conv1 = nn.Conv2d(ch_in,ch_out,kernel_size=3,stride=stride,padding=1)self.bn1 = nn.BatchNorm2d(ch_out)self.conv2 = nn.Conv2d(ch_out,ch_out,kernel_size=3,stride=1,padding=1)self.bn2 = nn.BatchNorm2d(ch_out)self.extra = nn.Sequential()if ch_out != ch_in:self.extra = nn.Sequential(nn.Conv2d(ch_in,ch_out,kernel_size=1,stride=stride),nn.BatchNorm2d(ch_out))def forward(self, x):out = F.relu(self.bn1(self.conv1(x)))out = self.bn2(self.conv2(out))#[b, ch_in, h, w] = > [b, ch_out, h, w]out = self.extra(x) + outout = F.relu((out))return outclass ResNet18(nn.Module):def __init__(self,num_class):super(ResNet18, self).__init__()self.conv1 = nn.Sequential(nn.Conv2d(3,16,kernel_size=3,stride=3,padding=0),nn.BatchNorm2d(16))# followed 4 blocks# [b, 16, h, w] => [b, 32, h ,w]self.blk1 = ResBlk(16, 32, stride=3)# [b, 32, h, w] => [b, 64, h, w]self.blk2 = ResBlk(32, 64, stride=3)# # [b, 64, h, w] => [b, 128, h, w]self.blk3 = ResBlk(64, 128, stride=2)# # [b, 128, h, w] => [b, 256, h, w]self.blk4 = ResBlk(128, 256, stride=2)# [b, 256, 7, 7]self.outlayer = nn.Linear(256*3*3,num_class)def forward(self,x):x = F.relu(self.conv1(x))x = self.blk1(x)x = self.blk2(x)x = self.blk3(x)x = self.blk4(x)print(x.shape)x = x.view(x.size(0), -1)x = self.outlayer(x)return xdef main():blk = ResBlk(64,128,stride=2)tmp = torch.randn(2,64,224,224)out = blk(tmp)print('block:',out.shape)model = ResNet18(5)tmp = torch.randn(2,3,224,224)out = model(tmp)print('resnet:',out.shape)p = sum(map(lambda p:p.numel(), model.parameters()))print('parameters size:',p)if __name__ == '__main__':main()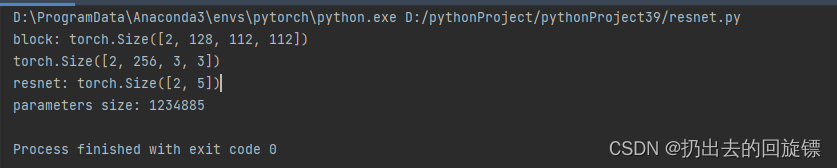
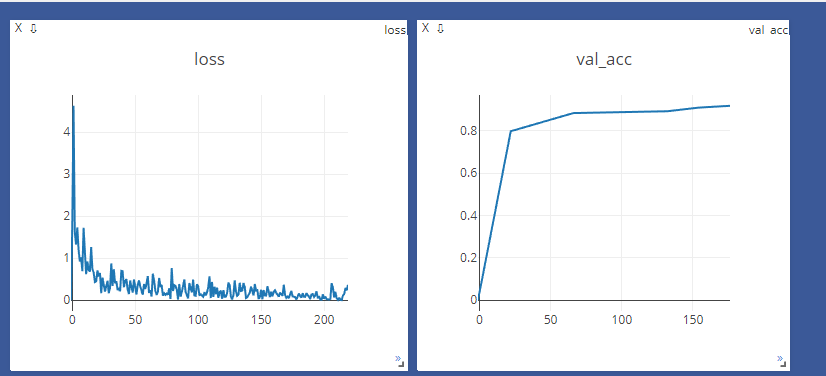
可视化损失函数和准确率:
import torch
from torch import optim, nn
import visdom
import torchvision
from torch.utils.data import DataLoaderfrom pokemon import Pokemon
from resnet import ResNet18batchsz = 32
lr = 1e-3
epochs = 10device = torch.device('cuda')
torch.manual_seed(1234)train_db = Pokemon('pokemon', 224, mode='train')
val_db = Pokemon('pokemon', 224, mode='val')
test_db = Pokemon('pokemon', 224, mode='test')
train_loader = DataLoader(train_db, batch_size=batchsz, shuffle=True,num_workers=4)
val_loader = DataLoader(val_db, batch_size=batchsz, num_workers=2)
test_loader = DataLoader(test_db, batch_size=batchsz, num_workers=2)viz = visdom.Visdom()def evalute(model, loader):model.eval()correct = 0total = len(loader.dataset)for x, y in loader:x, y = x.to(device), y.to(device)with torch.no_grad():logits = model(x)pred = logits.argmax(dim=1)correct += torch.eq(pred, y).sum().float().item()return correct / totaldef main():model = ResNet18(5).to(device)optimizer = optim.Adam(model.parameters(), lr=lr)criteon = nn.CrossEntropyLoss()best_acc, best_epoch = 0, 0global_step = 0viz.line([0], [-1], win='loss', opts=dict(title='loss'))viz.line([0], [-1], win='val_acc', opts=dict(title='val_acc'))for epoch in range(epochs):for step, (x, y) in enumerate(train_loader):# x: [b, 3, 224, 224], y: [b]x, y = x.to(device), y.to(device)model.train()logits = model(x)loss = criteon(logits, y)optimizer.zero_grad()loss.backward()optimizer.step()viz.line([loss.item()], [global_step], win='loss', update='append')global_step += 1if epoch % 1 == 0:val_acc = evalute(model, val_loader)if val_acc > best_acc:best_epoch = epochbest_acc = val_acctorch.save(model.state_dict(), 'best.mdl')viz.line([val_acc], [global_step], win='val_acc', update='append')print('best acc:', best_acc, 'best epoch:', best_epoch)model.load_state_dict(torch.load('best.mdl'))print('loaded from ckpt!')test_acc = evalute(model, test_loader)print('test acc:', test_acc)if __name__ == '__main__':main()