东莞手机网站建设公司/百度小说风云排行榜

【强化学习原理+项目专栏】必看系列:单智能体、多智能体算法原理+项目实战、相关技巧(调参、画图等、趣味项目实现、学术应用项目实现
专栏详细介绍:【强化学习原理+项目专栏】必看系列:单智能体、多智能体算法原理+项目实战、相关技巧(调参、画图等、趣味项目实现、学术应用项目实现
对于深度强化学习这块规划为:
- 基础单智能算法教学(gym环境为主)
- 主流多智能算法教学(gym环境为主)
- 主流算法:DDPG、DQN、TD3、SAC、PPO、RainbowDQN、QLearning、A2C等算法项目实战
- 一些趣味项目(超级玛丽、下五子棋、斗地主、各种游戏上应用)
- 单智能多智能题实战(论文复现偏业务如:无人机优化调度、电力资源调度等项目应用)
本专栏主要方便入门同学快速掌握强化学习单智能体|多智能体算法原理+项目实战。后续会持续把深度学习涉及知识原理分析给大家,让大家在项目实操的同时也能知识储备,知其然、知其所以然、知何由以知其所以然。
声明:部分项目为网络经典项目方便大家快速学习,后续会不断增添实战环节(比赛、论文、现实应用等)
-
专栏订阅(个性化选择):
-
强化学习原理+项目专栏大合集-《推荐订阅☆☆☆☆☆》
-
强化学习单智能体算法原理+项目实战《推荐订阅☆☆☆☆》
-
强化学习多智能体原理+项目实战《推荐订阅☆☆☆☆☆》
-
强化学习相关技巧(调参、画图等《推荐订阅☆☆☆》)
-
tensorflow_gym-强化学习:免费《推荐订阅☆☆☆☆》
-
强化学习从基础到进阶-案例与实践:免费《推荐订阅☆☆☆☆☆》
-
强化学习从基础到进阶–案例与实践[7.1]:深度确定性策略梯度DDPG算法、双延迟深度确定性策略梯度TD3算法详解项目实战
项目链接fork一下直接运行
https://www.heywhale.com/mw/project/649afec770567260f8b79b26
全系列代码包见文章顶部
1、定义算法
1.1 定义模型
!pip uninstall -y parl
!pip install parl
import parl
import paddle
import paddle.nn as nn
import paddle.nn.functional as F
class Actor(parl.Model):def __init__(self, n_states, n_actions):super(Actor, self).__init__()self.l1 = nn.Linear(n_states, 400)self.l2 = nn.Linear(400, 300)self.l3 = nn.Linear(300, n_actions)def forward(self, state):x = F.relu(self.l1(state))x = F.relu(self.l2(x))return paddle.tanh(self.l3(x))class Critic(parl.Model):def __init__(self, n_states, n_actions):super(Critic, self).__init__()self.l1 = nn.Linear(n_states, 400)self.l2 = nn.Linear(400 + n_actions, 300)self.l3 = nn.Linear(300, 1)def forward(self, state, action):x = F.relu(self.l1(state))x = F.relu(self.l2(paddle.concat([x, action], 1)))return self.l3(x)
class ActorCritic(parl.Model):def __init__(self, n_states, n_actions):super(ActorCritic, self).__init__()self.actor_model = Actor(n_states, n_actions)self.critic_model = Critic(n_states, n_actions)def policy(self, state):return self.actor_model(state)def value(self, state, action):return self.critic_model(state, action)def get_actor_params(self):return self.actor_model.parameters()def get_critic_params(self):return self.critic_model.parameters()
1.2 定义经验回放
from collections import deque
import random
class ReplayBuffer:def __init__(self, capacity: int) -> None:self.capacity = capacityself.buffer = deque(maxlen=self.capacity)def push(self,transitions):'''_summary_Args:trainsitions (tuple): _description_'''self.buffer.append(transitions)def sample(self, batch_size: int, sequential: bool = False):if batch_size > len(self.buffer):batch_size = len(self.buffer)if sequential: # sequential samplingrand = random.randint(0, len(self.buffer) - batch_size)batch = [self.buffer[i] for i in range(rand, rand + batch_size)]return zip(*batch)else:batch = random.sample(self.buffer, batch_size)return zip(*batch)def clear(self):self.buffer.clear()def __len__(self):return len(self.buffer)
1.3 定义智能体
import parl
import paddle
import numpy as npclass DDPGAgent(parl.Agent):def __init__(self, algorithm,memory,cfg):super(DDPGAgent, self).__init__(algorithm)self.n_actions = cfg['n_actions']self.expl_noise = cfg['expl_noise']self.batch_size = cfg['batch_size'] self.memory = memoryself.alg.sync_target(decay=0)def sample_action(self, state):action_numpy = self.predict_action(state)action_noise = np.random.normal(0, self.expl_noise, size=self.n_actions)action = (action_numpy + action_noise).clip(-1, 1)return actiondef predict_action(self, state):state = paddle.to_tensor(state.reshape(1, -1), dtype='float32')action = self.alg.predict(state)action_numpy = action.cpu().numpy()[0]return action_numpydef update(self):if len(self.memory) < self.batch_size: returnstate_batch, action_batch, reward_batch, next_state_batch, done_batch = self.memory.sample(self.batch_size)done_batch = np.expand_dims(done_batch , -1)reward_batch = np.expand_dims(reward_batch, -1)state_batch = paddle.to_tensor(state_batch, dtype='float32')action_batch = paddle.to_tensor(action_batch, dtype='float32')reward_batch = paddle.to_tensor(reward_batch, dtype='float32')next_state_batch = paddle.to_tensor(next_state_batch, dtype='float32')done_batch = paddle.to_tensor(done_batch, dtype='float32')critic_loss, actor_loss = self.alg.learn(state_batch, action_batch, reward_batch, next_state_batch,done_batch)
2. 定义训练
def train(cfg, env, agent):''' 训练'''print(f"开始训练!")rewards = [] # 记录所有回合的奖励for i_ep in range(cfg["train_eps"]):ep_reward = 0 state = env.reset() for i_step in range(cfg['max_steps']):action = agent.sample_action(state) # 采样动作next_state, reward, done, _ = env.step(action) agent.memory.push((state, action, reward,next_state, done)) state = next_state agent.update() ep_reward += reward if done:breakrewards.append(ep_reward)if (i_ep + 1) % 10 == 0:print(f"回合:{i_ep+1}/{cfg['train_eps']},奖励:{ep_reward:.2f}")print("完成训练!")env.close()res_dic = {'episodes':range(len(rewards)),'rewards':rewards}return res_dicdef test(cfg, env, agent):print("开始测试!")rewards = [] # 记录所有回合的奖励for i_ep in range(cfg['test_eps']):ep_reward = 0 state = env.reset() for i_step in range(cfg['max_steps']):action = agent.predict_action(state) next_state, reward, done, _ = env.step(action) state = next_state ep_reward += reward if done:breakrewards.append(ep_reward)print(f"回合:{i_ep+1}/{cfg['test_eps']},奖励:{ep_reward:.2f}")print("完成测试!")env.close()return {'episodes':range(len(rewards)),'rewards':rewards}
3、定义环境
OpenAI Gym中其实集成了很多强化学习环境,足够大家学习了,但是在做强化学习的应用中免不了要自己创建环境,比如在本项目中其实不太好找到Qlearning能学出来的环境,Qlearning实在是太弱了,需要足够简单的环境才行,因此本项目写了一个环境,大家感兴趣的话可以看一下,一般环境接口最关键的部分即使reset和step。
import gym
import os
import paddle
import numpy as np
import random
from parl.algorithms import DDPG
class NormalizedActions(gym.ActionWrapper):''' 将action范围重定在[0.1]之间'''def action(self, action):low_bound = self.action_space.lowupper_bound = self.action_space.highaction = low_bound + (action + 1.0) * 0.5 * (upper_bound - low_bound)action = np.clip(action, low_bound, upper_bound)return actiondef reverse_action(self, action):low_bound = self.action_space.lowupper_bound = self.action_space.highaction = 2 * (action - low_bound) / (upper_bound - low_bound) - 1action = np.clip(action, low_bound, upper_bound)return action
def all_seed(env,seed = 1):''' 万能的seed函数'''env.seed(seed) # env confignp.random.seed(seed)random.seed(seed)paddle.seed(seed)
def env_agent_config(cfg):env = NormalizedActions(gym.make(cfg['env_name'])) # 装饰action噪声if cfg['seed'] !=0:all_seed(env,seed=cfg['seed'])n_states = env.observation_space.shape[0]n_actions = env.action_space.shape[0]print(f"状态维度:{n_states},动作维度:{n_actions}")cfg.update({"n_states":n_states,"n_actions":n_actions}) # 更新n_states和n_actions到cfg参数中memory = ReplayBuffer(cfg['memory_capacity'])model = ActorCritic(n_states, n_actions)algorithm = DDPG(model, gamma=cfg['gamma'], tau=cfg['tau'], actor_lr=cfg['actor_lr'], critic_lr=cfg['critic_lr'])agent = DDPGAgent(algorithm,memory,cfg)return env,agent
4、设置参数
到这里所有qlearning模块就算完成了,下面需要设置一些参数,方便大家“炼丹”,其中默认的是笔者已经调好的~。另外为了定义了一个画图函数,用来描述奖励的变化。
import argparse
import matplotlib.pyplot as plt
import seaborn as sns
def get_args():""" 超参数"""parser = argparse.ArgumentParser(description="hyperparameters") parser.add_argument('--algo_name',default='DDPG',type=str,help="name of algorithm")parser.add_argument('--env_name',default='Pendulum-v0',type=str,help="name of environment")parser.add_argument('--train_eps',default=200,type=int,help="episodes of training")parser.add_argument('--test_eps',default=20,type=int,help="episodes of testing")parser.add_argument('--max_steps',default=100000,type=int,help="steps per episode, much larger value can simulate infinite steps")parser.add_argument('--gamma',default=0.99,type=float,help="discounted factor")parser.add_argument('--critic_lr',default=1e-3,type=float,help="learning rate of critic")parser.add_argument('--actor_lr',default=1e-4,type=float,help="learning rate of actor")parser.add_argument('--memory_capacity',default=80000,type=int,help="memory capacity")parser.add_argument('--expl_noise',default=0.1,type=float)parser.add_argument('--batch_size',default=128,type=int)parser.add_argument('--target_update',default=2,type=int)parser.add_argument('--tau',default=1e-2,type=float)parser.add_argument('--critic_hidden_dim',default=256,type=int)parser.add_argument('--actor_hidden_dim',default=256,type=int)parser.add_argument('--device',default='cpu',type=str,help="cpu or cuda") parser.add_argument('--seed',default=1,type=int,help="random seed")args = parser.parse_args([]) args = {**vars(args)} # 将args转换为字典 # 打印参数print("训练参数如下:")print(''.join(['=']*80))tplt = "{:^20}\t{:^20}\t{:^20}"print(tplt.format("参数名","参数值","参数类型"))for k,v in args.items():print(tplt.format(k,v,str(type(v)))) print(''.join(['=']*80)) return args
def smooth(data, weight=0.9): '''用于平滑曲线,类似于Tensorboard中的smoothArgs:data (List):输入数据weight (Float): 平滑权重,处于0-1之间,数值越高说明越平滑,一般取0.9Returns:smoothed (List): 平滑后的数据'''last = data[0] # First value in the plot (first timestep)smoothed = list()for point in data:smoothed_val = last * weight + (1 - weight) * point # 计算平滑值smoothed.append(smoothed_val) last = smoothed_val return smootheddef plot_rewards(rewards,cfg,path=None,tag='train'):sns.set()plt.figure() # 创建一个图形实例,方便同时多画几个图plt.title(f"{tag}ing curve on {cfg['device']} of {cfg['algo_name']} for {cfg['env_name']}")plt.xlabel('epsiodes')plt.plot(rewards, label='rewards')plt.plot(smooth(rewards), label='smoothed')plt.legend()5、训练
# 获取参数
cfg = get_args()
# 训练
env, agent = env_agent_config(cfg)
res_dic = train(cfg, env, agent)plot_rewards(res_dic['rewards'], cfg, tag="train")
# 测试
res_dic = test(cfg, env, agent)
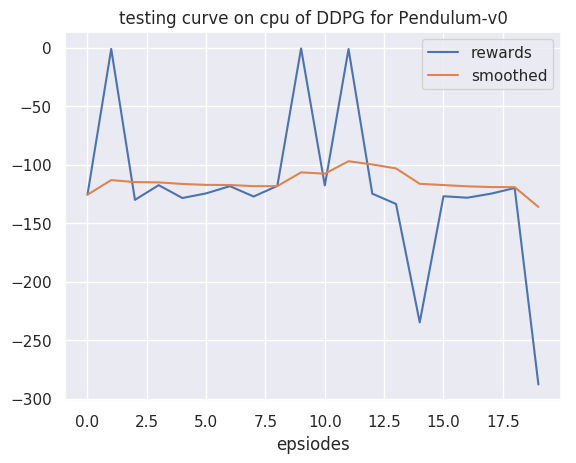
plot_rewards(res_dic['rewards'], cfg, tag="test") # 画出结果
训练参数如下:
================================================================================参数名 参数值 参数类型 algo_name DDPG <class 'str'> env_name Pendulum-v0 <class 'str'> train_eps 200 <class 'int'> test_eps 20 <class 'int'> max_steps 100000 <class 'int'> gamma 0.99 <class 'float'> critic_lr 0.001 <class 'float'> actor_lr 0.0001 <class 'float'> memory_capacity 80000 <class 'int'> expl_noise 0.1 <class 'float'> batch_size 128 <class 'int'> target_update 2 <class 'int'> tau 0.01 <class 'float'> critic_hidden_dim 256 <class 'int'> actor_hidden_dim 256 <class 'int'> device cpu <class 'str'> seed 1 <class 'int'>
================================================================================
状态维度:3,动作维度:1
开始训练!
回合:10/200,奖励:-922.80
回合:20/200,奖励:-390.80
回合:30/200,奖励:-125.50
回合:40/200,奖励:-822.66
回合:50/200,奖励:-384.92
回合:60/200,奖励:-132.26
回合:70/200,奖励:-240.20
回合:80/200,奖励:-242.37
回合:90/200,奖励:-127.13
回合:100/200,奖励:-365.29
回合:110/200,奖励:-126.27
回合:120/200,奖励:-231.47
回合:130/200,奖励:-1.98
回合:140/200,奖励:-223.84
回合:150/200,奖励:-123.29
回合:160/200,奖励:-362.06
回合:170/200,奖励:-126.93
回合:180/200,奖励:-119.77
回合:190/200,奖励:-114.72
回合:200/200,奖励:-116.01
完成训练!
开始测试!
回合:1/20,奖励:-125.61
回合:2/20,奖励:-0.97
回合:3/20,奖励:-130.02
回合:4/20,奖励:-117.46
回合:5/20,奖励:-128.45
回合:6/20,奖励:-124.48
回合:7/20,奖励:-118.31
回合:8/20,奖励:-127.18
回合:9/20,奖励:-118.09
回合:10/20,奖励:-0.55
回合:11/20,奖励:-117.72
回合:12/20,奖励:-1.08
回合:13/20,奖励:-124.74
回合:14/20,奖励:-133.55
回合:15/20,奖励:-234.81
回合:16/20,奖励:-126.93
回合:17/20,奖励:-128.20
回合:18/20,奖励:-124.76
回合:19/20,奖励:-119.91
回合:20/20,奖励:-287.89
完成测试!








项目链接fork一下直接运行
https://www.heywhale.com/mw/project/649afec770567260f8b79b26