http://blog.csdn.net/u014515202/article/details/73293917
方法1:串口接受数据,定时器来判断超时是否接受数据完成。
方法2:DMA接受+IDLE中断
实现思路:采用STM32F103的串口1,并配置成空闲中断IDLE模式且使能DMA接收,并同时设置接收缓冲区和初始化DMA。那么初始化完成之后,当外部给单片机发送数据的时候,假设这帧数据长度是200个字节,那么在单片机接收到一个字节的时候并不会产生串口中断,而是DMA在后台把数据默默地搬运到你指定的缓冲区里面。当整帧数据发送完毕之后串口才会产生一次中断,此时可以利用DMA_GetCurrDataCounter();函数计算出本次的数据接受长度,从而进行数据处理。
应用对象:适用于各种串口相关的通信协议,如:MODBUS,PPI ;还有类似于GPS数据接收解析,串口WIFI的数据接收等,都是很好的应用对象。
关键代码分析:
void uart_init(u32 bound);
void MYDMA_Enable(DMA_Channel_TypeDef*DMA_CHx);#endif
usart.C
void uart_init(u32 bound)
{GPIO_InitTypeDef GPIO_InitStructure;USART_InitTypeDef USART_InitStructure;NVIC_InitTypeDef NVIC_InitStructure;DMA_InitTypeDef DMA_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA,ENABLE); RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1, ENABLE); RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2,ENABLE);USART_DeInit(USART1); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_Init(GPIOA, &GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;GPIO_Init(GPIOA, &GPIO_InitStructure); NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; NVIC_Init(&NVIC_InitStructure); USART_InitStructure.USART_BaudRate = bound;USART_InitStructure.USART_WordLength = USART_WordLength_8b;USART_InitStructure.USART_StopBits = USART_StopBits_1;USART_InitStructure.USART_Parity = USART_Parity_No;USART_InitStructure.USART_HardwareFlowControl =USART_HardwareFlowControl_None;USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; USART_Init(USART1, &USART_InitStructure); USART_ITConfig(USART1, USART_IT_IDLE, ENABLE);USART_DMACmd(USART1,USART_DMAReq_Rx,ENABLE); USART_Cmd(USART1, ENABLE); DMA_DeInit(DMA1_Channel5); DMA_InitStructure.DMA_PeripheralBaseAddr = (u32)&USART1->DR; DMA_InitStructure.DMA_MemoryBaseAddr = (u32)DMA_Rece_Buf; DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralSRC; DMA_InitStructure.DMA_BufferSize = DMA_Rec_Len; DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable; DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable; DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_Byte; DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_Byte; DMA_InitStructure.DMA_Mode = DMA_Mode_Normal; DMA_InitStructure.DMA_Priority = DMA_Priority_Medium; DMA_InitStructure.DMA_M2M = DMA_M2M_Disable; DMA_Init(DMA1_Channel5, &DMA_InitStructure); DMA_Cmd(DMA1_Channel5, ENABLE);
}
void MYDMA_Enable(DMA_Channel_TypeDef*DMA_CHx)
{ DMA_Cmd(DMA_CHx, DISABLE ); DMA_SetCurrDataCounter(DMA_CHx,DMA_Rec_Len);DMA_Cmd(DMA_CHx, ENABLE);
}
void Usart1_Send(u8 *buf,u8 len)
{u8 t;for(t=0;t<len;t++) { while(USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET); USART_SendData(USART1,buf[t]);} while(USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET);
}
void USART1_IRQHandler(void)
{if(USART_GetITStatus(USART1, USART_IT_IDLE) != RESET) {USART_ReceiveData(USART1);Usart1_Rec_Cnt =DMA_Rec_Len-DMA_GetCurrDataCounter(DMA1_Channel5); printf ("Thelenght:%d\r\n",Usart1_Rec_Cnt);printf ("The data:\r\n");Usart1_Send(DMA_Rece_Buf,Usart1_Rec_Cnt);printf ("\r\nOver! \r\n");USART_ClearITPendingBit(USART1,USART_IT_IDLE); MYDMA_Enable(DMA1_Channel5); } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 11
方法3:实现思路:直接利用stm32的RXNE和IDLE中断进行接收不定字节数据。
基本知识:
IDLE中断什么时候发生?
IDLE就是串口收到一帧数据后,发生的中断。什么是一帧数据呢?比如说给单片机一次发来1个字节,或者一次发来8个字节,这些一次发来的数据,就称为一帧数据,也可以叫做一包数据。
如何判断一帧数据结束,就是我们今天讨论的问题。因为很多项目中都要用到这个,因为只有接收到一帧数据以后,你才可以判断这次收了几个字节和每个字节的内容是否符合协议要求。
看了前面IDLE中断的定义,你就会明白了,一帧数据结束后,就会产生IDLE中断。
如何配置好IDLE中断?
下面我们就配置好串口IDLE中断吧。
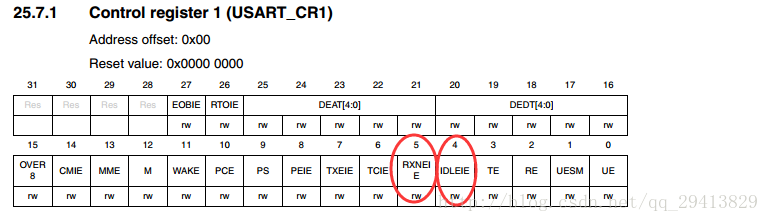
这是串口CR1寄存器,其中,对bit4写1开启IDLE中断,对bit5写1开启接收数据中断。(注意:不同系列的STM32,对应的寄存器位可能不同)
RXNE中断和IDLE中断的区别?
当接收到1个字节,就会产生RXNE中断,当接收到一帧数据,就会产生IDLE中断。比如给单片机一次性发送了8个字节,就会产生8次RXNE中断,1次IDLE中断。
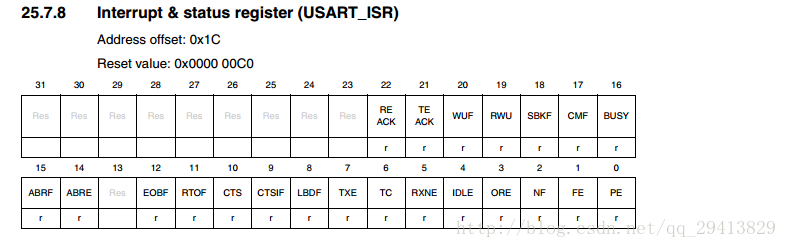
这是状态寄存器,当串口接收到数据时,bit5就会自动变成1,当接收完一帧数据后,bit4就会变成1.
需要注意的是,在中断函数里面,需要把对应的位清0,否则会影响下一次数据的接收。比如RXNE接收数据中断,只要把接收到的一个字节读出来,就会清除这个中断。IDLE中断,如何是F0系列的单片机,需要用ICR寄存器来清除,如果是F1系列的单片机,清除方法是“先读SR寄存器,再读DR寄存器”。(我怎么知道?手册上写的)
下面以STM32F103为例给出源程序。
我们先来看程序中的主要部分。
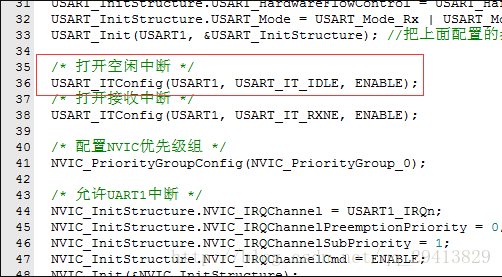
串口初始化函数片段
串口中断函数
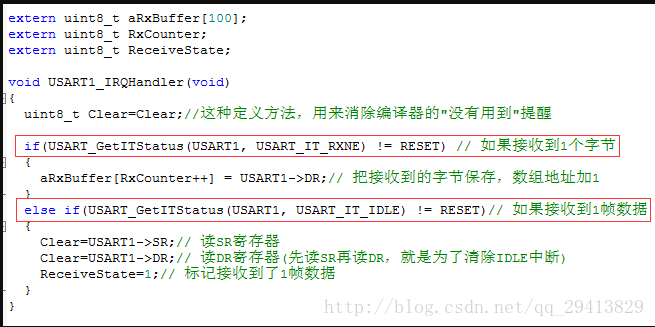
串口中断函数里面,最重要的两条语句,就是上图中圈出来的两条语句。第一条语句用来判断是否接收到1个字节,第二条语句用来判断是否接收到1帧数据。(是不是感觉超级方便?妈妈再也不用担心我如何判断是否接收完1帧数据了。)
主函数

这个主函数,是用来验证接收的正确性的。RxCounter表示的是这一帧数据有几个字节,接收完一帧数据,会在中断函数里面把ReceiveState置1,然后,通过串口把接收到的数据发送回串口。这样,既验证了接收了多少字节的正确性,又验证了接收到的数据是否正确。
两个程序代码均采用stm32f103zet6测试过,完全没问题。