鄂州网站建设报价/旺道seo系统
PurePursuit轨迹跟踪控制。
文章目录
- 1. 技术原理
- 2. 代码实现
- 3. 算法改进
1. 技术原理
轨迹跟踪模块主要负责控制车辆沿着规划的路径点行驶,即根据车辆当前的速度、位姿及路径点信息,计算出下一时刻车辆的控制参数(速度和转向),使车辆尽可能沿着规划的路径平稳行驶。
常用的跟踪控制算法有:纯跟踪算法(pure pursuit)、PID、MPC等(由易到难)。
纯跟踪算法(pure pursuit)的思想就是:把阿克曼转向的车辆抽象成自行车两轮模型,构建前轮转角和后轴曲率的约束关系,然后以车后轴为切点,车辆纵向车身为切线,控制车辆后轴中心经过轨迹上一系列的点。

在示意图中,(Cx,Cy)表示当前智能车的位置坐标,(Gx, Gy)表示跟踪轨迹的预瞄点的位置坐标,Ld为预瞄点到车辆后轴中心的距离即预瞄距离,R表示跟踪的曲率半径。根据pure pursuit算法计算出控制量前轮转角δ以及对应的车辆转向角W。
计算如下:
2. 代码实现
pure_pursuit_node.cpp(主函数,实例化对象并运行)
// ROS Includes
#include <ros/ros.h>
// User defined includes
#include <pure_pursuit/pure_pursuit_core.h>int main(int argc, char** argv)
{ros::init(argc, argv, "pure_pursuit");waypoint_follower::PurePursuitNode ppn;ppn.run();return 0;
}
pure_pursuit_core.h(PurePursuitNode类定义)
// 纯跟踪节点运行
void PurePursuitNode::run()
{ROS_INFO_STREAM("pure pursuit start");ros::Rate loop_rate(LOOP_RATE_);while (ros::ok()){ros::spinOnce();if (!is_pose_set_ || !is_waypoint_set_ || !is_velocity_set_){ROS_WARN("Necessary topics are not subscribed yet ... ");loop_rate.sleep();continue;}pp_.setLookaheadDistance(computeLookaheadDistance());pp_.setMinimumLookaheadDistance(minimum_lookahead_distance_);double kappa = 0;bool can_get_curvature = pp_.canGetCurvature(&kappa);publishTwistStamped(can_get_curvature, kappa);publishControlCommandStamped(can_get_curvature, kappa);health_checker_ptr_->NODE_ACTIVATE();health_checker_ptr_->CHECK_RATE("topic_rate_vehicle_cmd_slow", 8, 5, 1,"topic vehicle_cmd publish rate slow.");// for visualization with Rvizpub11_.publish(displayNextWaypoint(pp_.getPoseOfNextWaypoint()));pub13_.publish(displaySearchRadius(pp_.getCurrentPose().position, pp_.getLookaheadDistance()));pub12_.publish(displayNextTarget(pp_.getPoseOfNextTarget()));pub15_.publish(displayTrajectoryCircle(waypoint_follower::generateTrajectoryCircle(pp_.getPoseOfNextTarget(), pp_.getCurrentPose())));if (add_virtual_end_waypoints_){pub18_.publish(displayExpandWaypoints(pp_.getCurrentWaypoints(), expand_size_));}std_msgs::Float32 angular_gravity_msg;angular_gravity_msg.data =computeAngularGravity(computeCommandVelocity(), kappa);pub16_.publish(angular_gravity_msg);publishDeviationCurrentPosition(pp_.getCurrentPose().position, pp_.getCurrentWaypoints());is_pose_set_ = false;is_velocity_set_ = false;is_waypoint_set_ = false;loop_rate.sleep();}
}// 发布时间戳// 发布控制指令// 计算预瞄距离// 计算速度// 计算加速度// 计算转向角
pure_pursuit.h(PurePursuit类定义)
// 计算曲率// 线性插值
pure_pursuit_viz.h(marker显示定义)
// 显示目标点// 生成轨迹// 显示轨迹
3. 算法改进
使用后发现pure pursuit只能用于一些简单的场景,如直线道路上的循迹;对于一些复杂的路径跟踪效果较差,例如U型/S型等曲线路径。根据pure pursuit的原理可以知道,其跟踪效果很大程度上取决于前视距离ld的选择,设置固定的前视距离和路径曲率肯定无法适应不同的路径,因此就需要对前视距离的计算方法进行研究改进。
人类开车时会根据不同驾驶速度和不同路段,进行判断合适的视线跟踪点。因此,我们就可以将这个过程抽象出来,加以处理,形成一个选择前视距离的规则。
动态调整预瞄距离的计算规则:与车速的关系;与跟踪轨迹曲率的关系;跟踪轨迹曲率K计算。
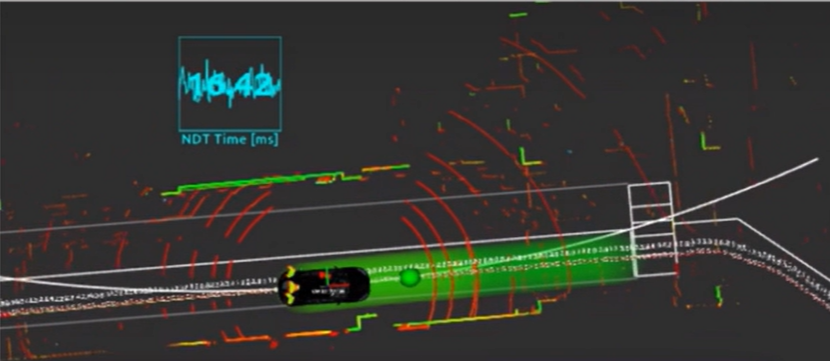
在Autoware中,绿色的球体即为计算的跟踪预瞄点;红色的点为规划好的路径点;白色的轨迹为轨迹跟踪算法计算出的车辆将要运行的轨迹。
之后要做的事:
-
如何做算法改进;
-
如何手撕算法;
-
针对具体问题,如做倒车场景下的轨迹跟踪。
参考:
http://t.csdn.cn/O6KCy
http://t.csdn.cn/J1nPl
以上。