怎么查出这个网站是谁做的/sem优化软件选哪家

本文字数: 2378 阅读时间:10分钟
01
Lgsvl仿真器
这里主要介绍下Lgsvl这款仿真器,它是由LG电子美国研发中心基于Unity开发的适用于自动驾驶开发者的多机器人模拟器。可以直接和Autoware和Apollo进行对接,同时还提供生成高精度地图。只需要做很小的集成就可以用来测试和验证整个自动驾驶系统。
下图是Lgsvl中正在测试的自动驾驶车辆。

我们首先介绍如何安装仿真器并且和apollo进行测试。接下来会介绍仿真器具体的功能实现,包括如何模拟传感器(毫米波,激光雷达),可以进行哪些情况下的自动驾驶测试,最后我们会介绍lgsvl仿真器的python api。
02
系统配置
仿真器需要渲染整个自动驾驶所需要的环境,为了保证足够的帧率,对系统的配置要求如下。
4GHz四核CPU
Nvidia GTX 1080 (8GB memory)
Windows 10 64 bit
对于操作系统采用windows更好,如果是linux也可以运行,效率可能会低一点。
有2种方式来运行仿真器,一种是直接下来编译好的二进制文件,另外也可以自己下载源码后进行编译。后一种方式在你需要做一定的定制开发的时候,比较有用,如果你只是想尝试下这款仿真器,可以直接下载最新的发布[版本](lgsvl/simulator)
如果Apollo或者Autoware和仿真器在一台主机上运行,那么至少要求10G以上的GPU内存。
如果Apollo或者Autoware在不同的系统上运行,那么需要系统直接是前兆的网络进行连接,最好通过前兆的交换机进行连接。
03
下载并运行
1. 下载最新发布的仿真器文件,你可以选择Windows版本或者Linux版本,通过lgsvl/simulator
2. 确认最新的NVIDIA驱动已经安装。
Windows
打开"NVIDIA GeForce Experience"
找到"驱动"选项
查找更新
下载并且更新驱动
或者手动从[英伟达官网](Download Drivers)下载驱动
linux
添加图形驱动[PPA]
打开"Software & Updates"
找到"Additional Drivers"选项
选择最新的NVIDIA驱动
安装"libvulkan",通过命令"sudo apt install libvulkan1"
3. 解压下载好的仿真器可执行文件,并且运行。
从源码编译运行
如果你需要从源码编译运行仿真器,你可以参考这个[Build instructions - LGSVL Simulator]
04
仿真器介绍
启动仿真器之后,你会看见“打开浏览器”的按钮,点击按钮之后会出现web界面。
在侧边栏选择仿真器,并且选择需要运行的地图和车辆。一个推荐的配置是地图选择"BorregasAve",车辆选择"Jaguar2015XE (Apollo 5.0)",然后点击运行。
车辆将出现在选择好的仿真地图中,你可以通过快捷键(← ↑ ↓ → )来控制车辆,并且切换视角,完整的快捷键在[这里](Keyboard shortcuts - LGSVL Simulator)
如果需要和autoware、Apollo系统一起仿真,可以分别参考[autoware](lgsvl/Autoware)和[apollo5.0](lgsvl/apollo-5.0)
05
Web仿真器配置界面
在上述仿真器启动流程中,点击打开浏览器,会出现Web配置管理界面,在这里我们详细介绍下如何配置仿真器。Web界面见下图所示,一共有4个配置选项"地图、车辆、集群、仿真器"。
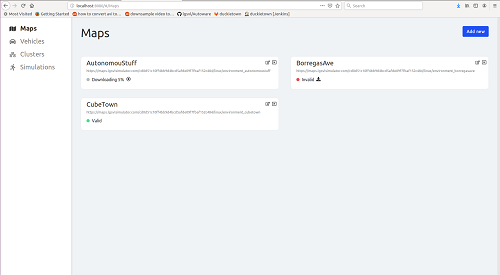
下面我们依次看下如何配置这4个选项,首先我们查看地图。
地图
比较简单的方法是直接下载编译好的地图,目前编译好的地图发布在[Maps], 提供的地图分为2部分,一部分是仿真器中负责渲染的地图,这个地图在Web界面种设置,还有一个部分是高精度地图,这是自动驾驶系统所需要的,放在对应的自动驾驶系统地图目录中。
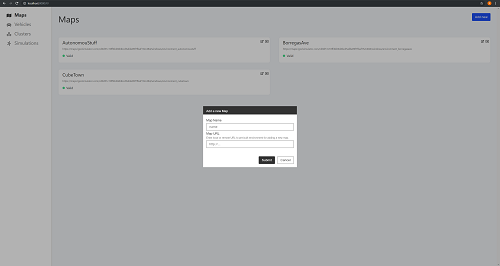
增加新地图,点击"Add new"按钮添加新地图,输入地图名称,以及地图所在的位置,这里有2种方式,一种是直接添加对应的url并且下载,另一种是手动下载地图到本地,然后选择对应的本地文件。
车辆
添加车辆和添加地图类似,和地图不同的是,车辆新增加了配置信息,这些配置信息主要是车辆自带的传感器配置和对应的频率、位置、topic信息等。
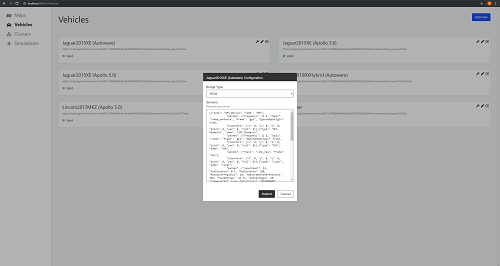
下面是雷达传感器的配置示例。
{
"type": "Lidar",
"name": "Lidar",
"params": {
"LaserCount": 32,
"MinDistance": 0.5,
"MaxDistance": 100,
"RotationFrequency": 10,
"MeasurementsPerRotation": 360,
"FieldOfView": 41.33,
"CenterAngle": 10,
"Compensated": true,
"PointColor": "#ff000000",
"Topic": "/points_raw",
"Frame": "velodyne"
},
"transform": {
"x": 0,
"y": 2.312,
"z": -0.3679201,
"pitch": 0,
"yaw": 0,
"roll": 0
}
},